
Introduction
There has been a dramatic growth of drone market in recent years. Their applications such as disaster monitoring, 3-D mapping, aerial photography, surveillance and unmanned cargo system have proved that drones would be a key technology in upcoming decades. In 2016, Rwanda government officially opened their first drone delivery program. This program aims in delivering blood, plasma and coagulants to hospitals in rural areas of the country, where poor road conditions often delay time-critical delivery of medical supplies for hours or even days. With drones, delivery time reduces to minutes. However, autonomous flight of Unmanned Aerial Vehicles is still an open problem not yet definitively solved in every scenario.
Flight time is the top design challenge for applications aiming beyond visual line-of-sight operation. Since the drone has to generate a thrust force at all time to move around, it requires high amount of electrical power. Also the battery itself amounts to around 50% of the drones weight. Hence for improving the time of flight of the drone considerably, there needs to be some breakthrough in the development of new types of batteries with higher power density. According to a recent market study, almost 50% of drones in the market have an estimated battery life of less than 30 minutes, 35% can fly between 30 and 60 minutes and the remaining 15% and less can fly more than an hour all under ideal flying conditions without additional payload. With such time of flights, a typical drone can only travel a round trip of 5 km. With payload the above flight time reduces drastically. Under such a circumstance, it is inevitable to think of a solution where drones can recharge themselves autonomously.
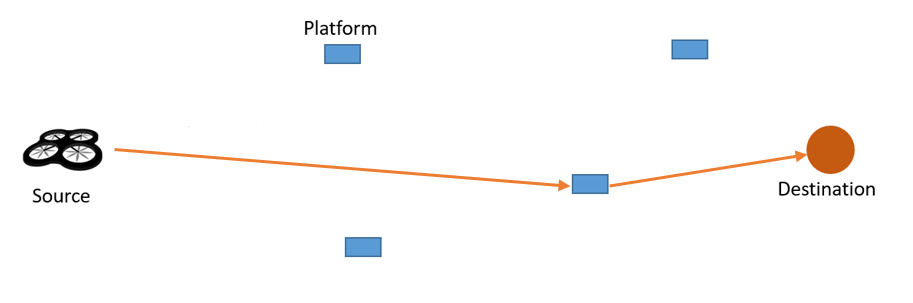
We aim to design a system which enables the drone to reach far off destinations by autonomously recharging itself on intermediary landing platforms as shown in figure. Thus the proposed system increases the range of operation of a typical drone.
Demonstration
People



Jishnu Pavithran
