
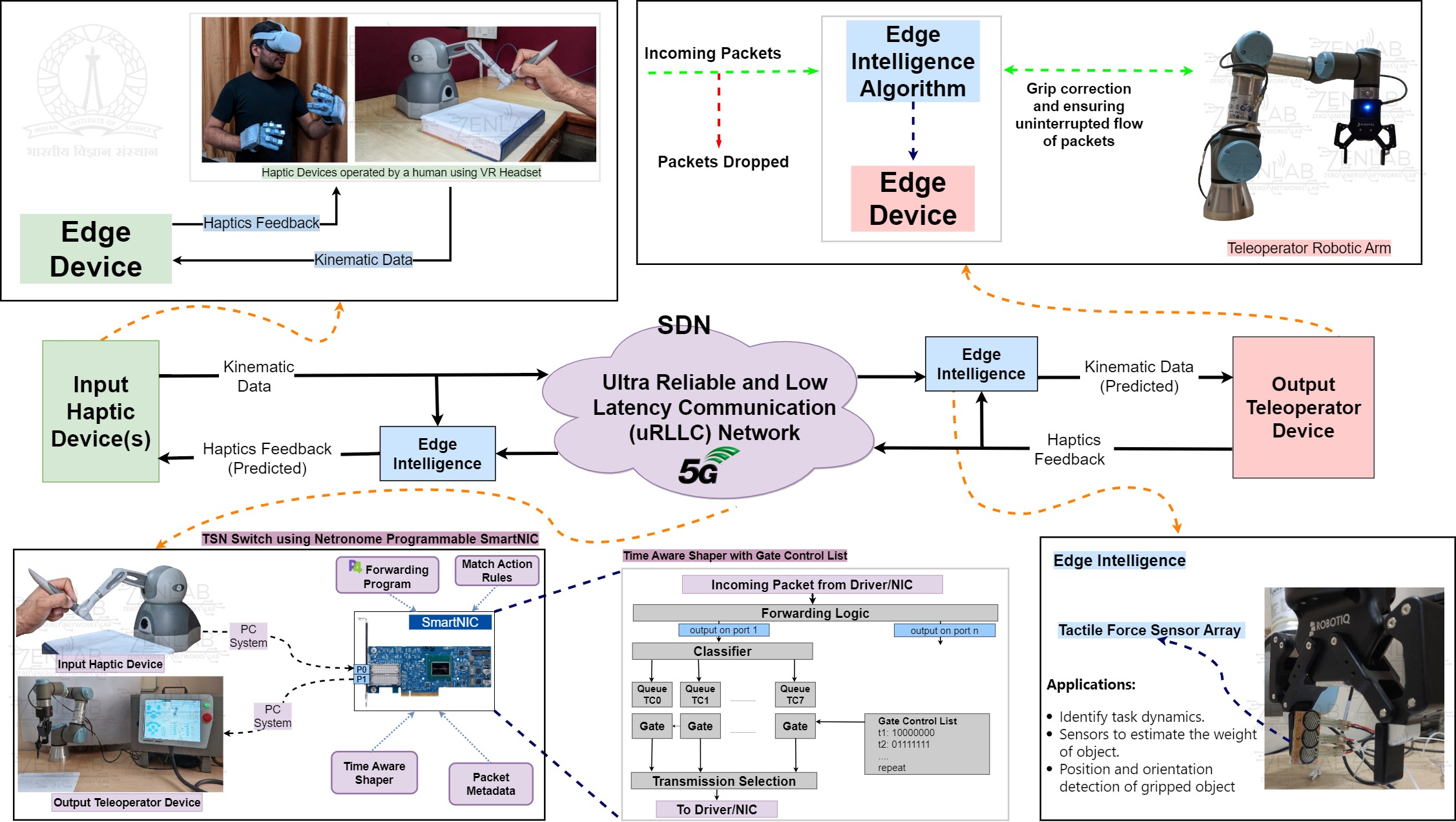
Objective: Design and implementation of a Tactile Cyber-Physical System for real-time interaction between physical and virtual worlds for applications requiring ultra-reliable low latency communications
Time-sensitive networking (TSN) is the IEEE 802.1Q defined standard technology to provide deterministic messaging on standard Ethernet. It provides guarantees of delivery and minimized jitter using time scheduling for those real-time applications that require determinism.
Overview:
Modules:
Time-Senstitive Networking (TSN) switch (Towards implementing IEEE 802.1 TSN):
- Time Synchronization (Towards implementing IEEE 802.1AS)
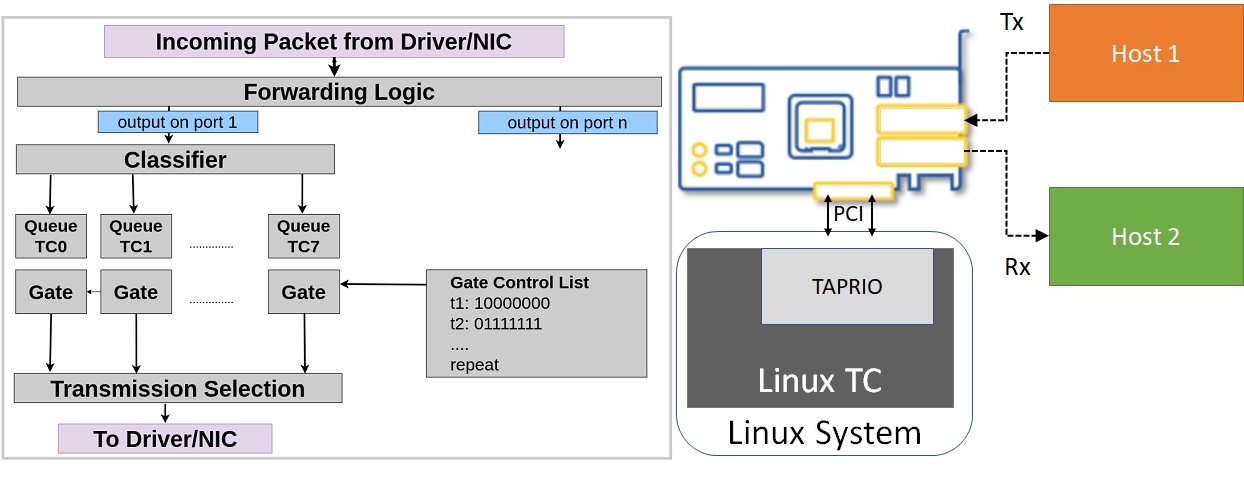
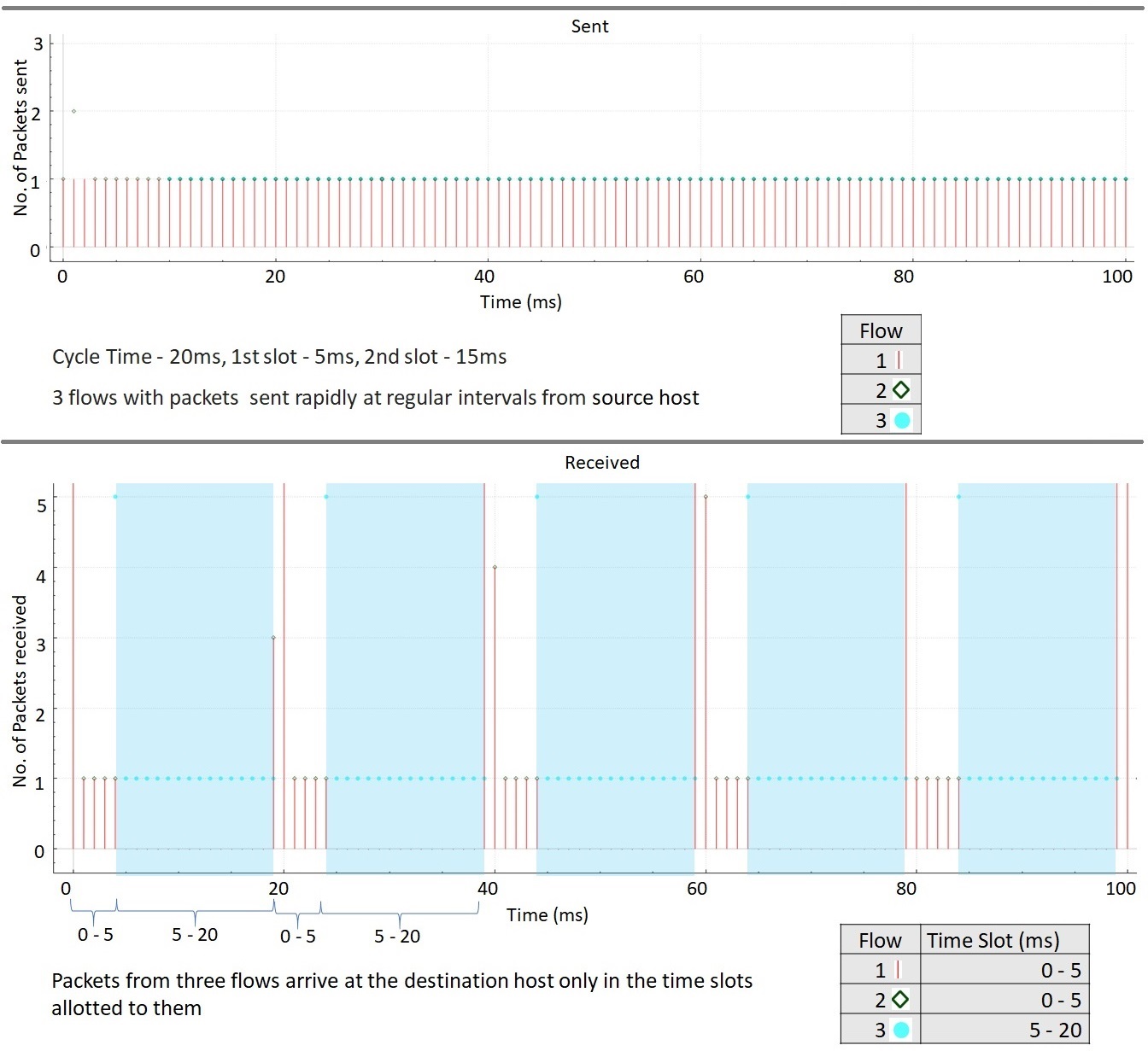
- Time Aware Shaper (Towards implementing IEEE 802.1Qbv)
- Packet duplication and Elimination (Towards implementing IEEE. 802.1CB)
Work Done:
Time synchronization:
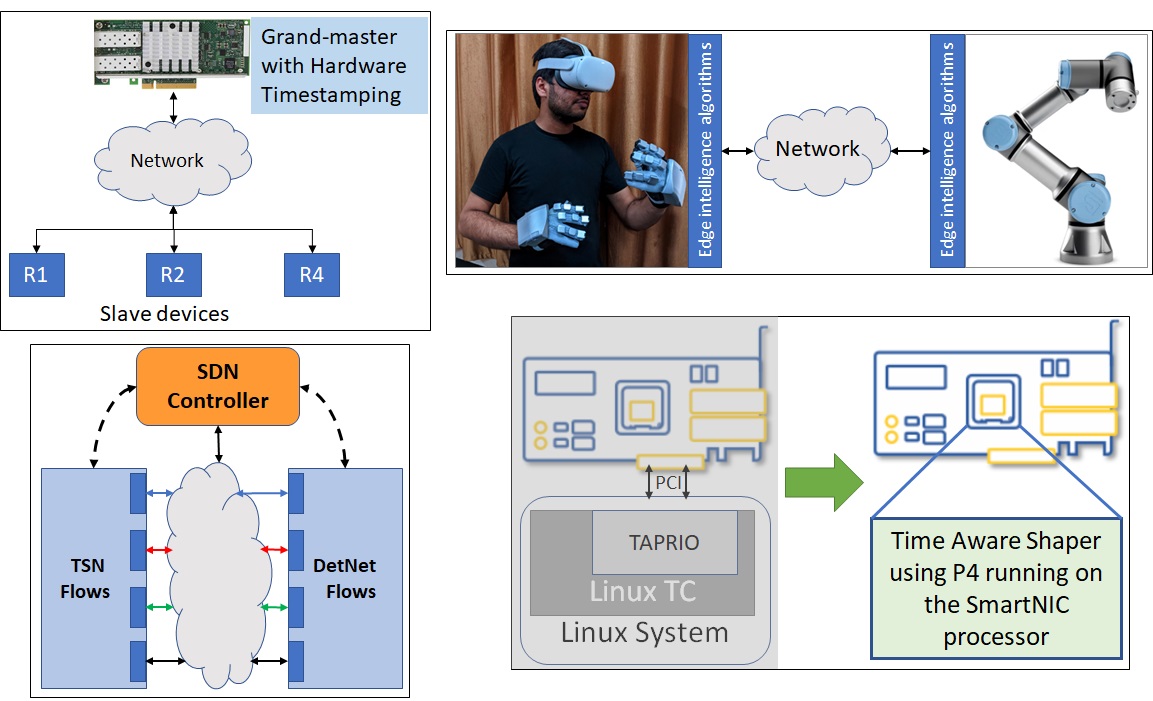
Implemented Precision Time Protocol (PTP) on Linux devices. Tested using four Raspberry Pi devices – R1, R2, R3, and R4. R3 is the grand-master clock using the Best Master Clock Algorithm (BMCA). Remaining devices are in slave configuration. Using software timestamping a sub 100 μs synchronization error was obtained.

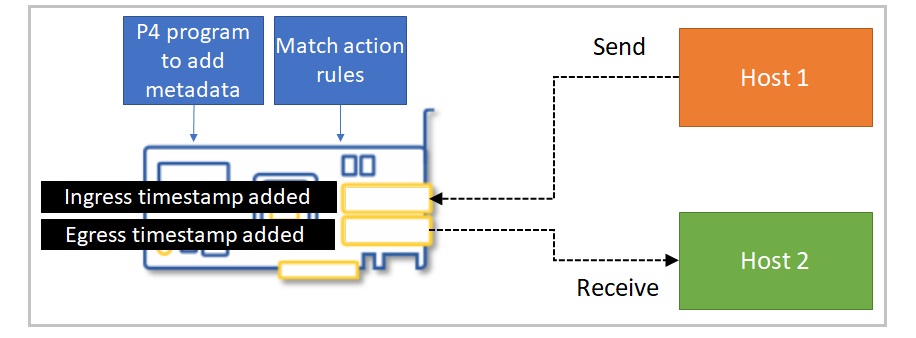
P4 based switch using Netronome Agilio SmartNIC:
We have setup a ethernet swtich using P4 programming language on the Netwronome Agilio SmartNIC. The match action table/rules contain the MAC addresses of the connected hosts. IP address is extracted from the packet and the packet is forwarded to a matching MAC address. The P4 program is also useful for obtaining and adding timestamp in a custom metadata header. Obtaining timestamps at the ports of the switch is a basic step for TSN.
Time Aware Shaper using LinuxTC on Netronome card:
Ongoing and future work:
People




Soumya Kanta Rana

Himanshu Verma
Social media
