
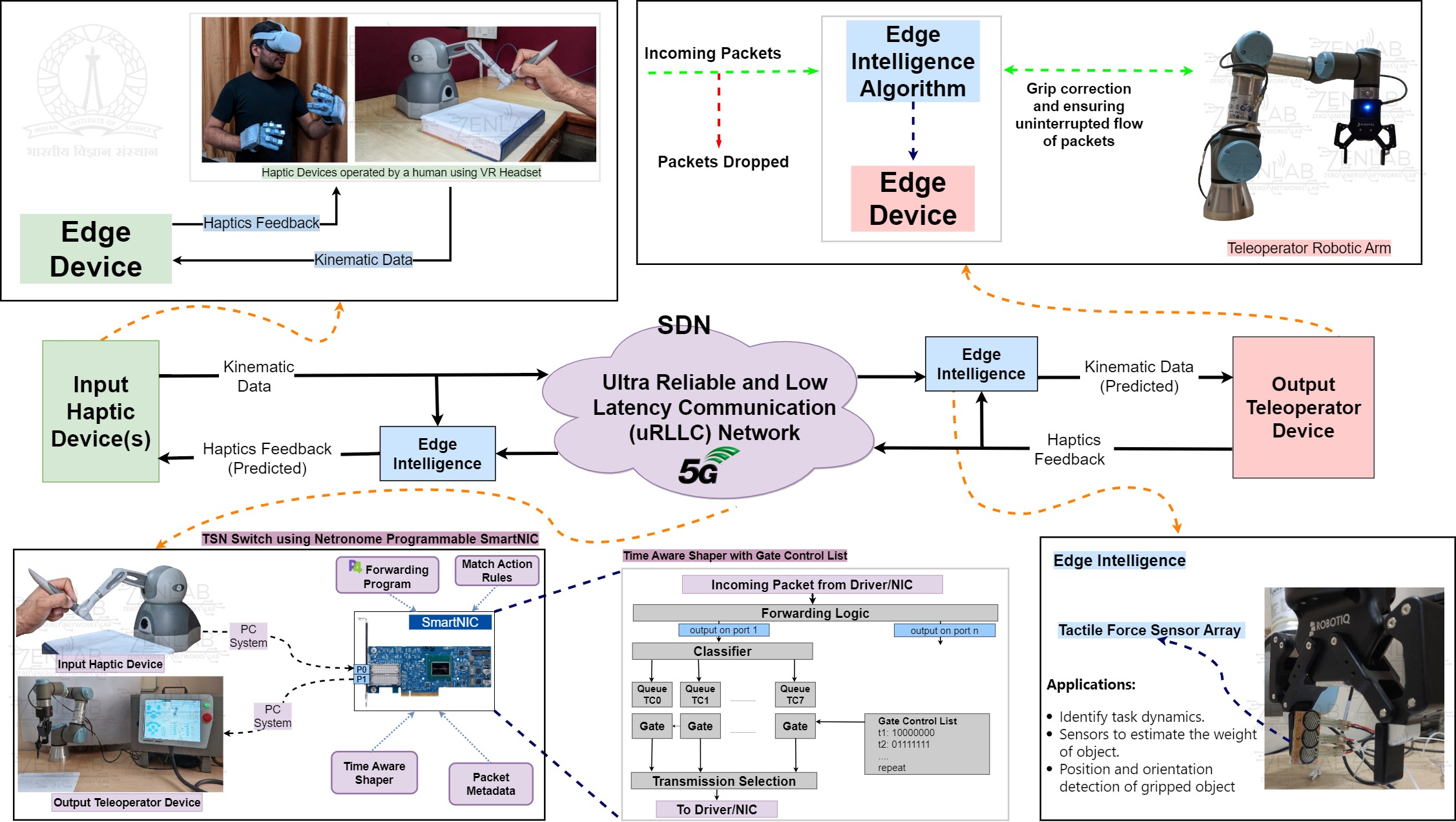
Intercity haptic bilateral teleoperation of a robotic arm using a haptic device
Objective: Design and implementation of a Tactile Cyber-Physical System for real-time interaction between physical and virtual worlds for applications requiring ultra-reliable low latency communications
Overview:
Modules:
- Real time control of a teleoperator robotic arm
- Using haptic devices to send kinematic data and receive haptic feedback
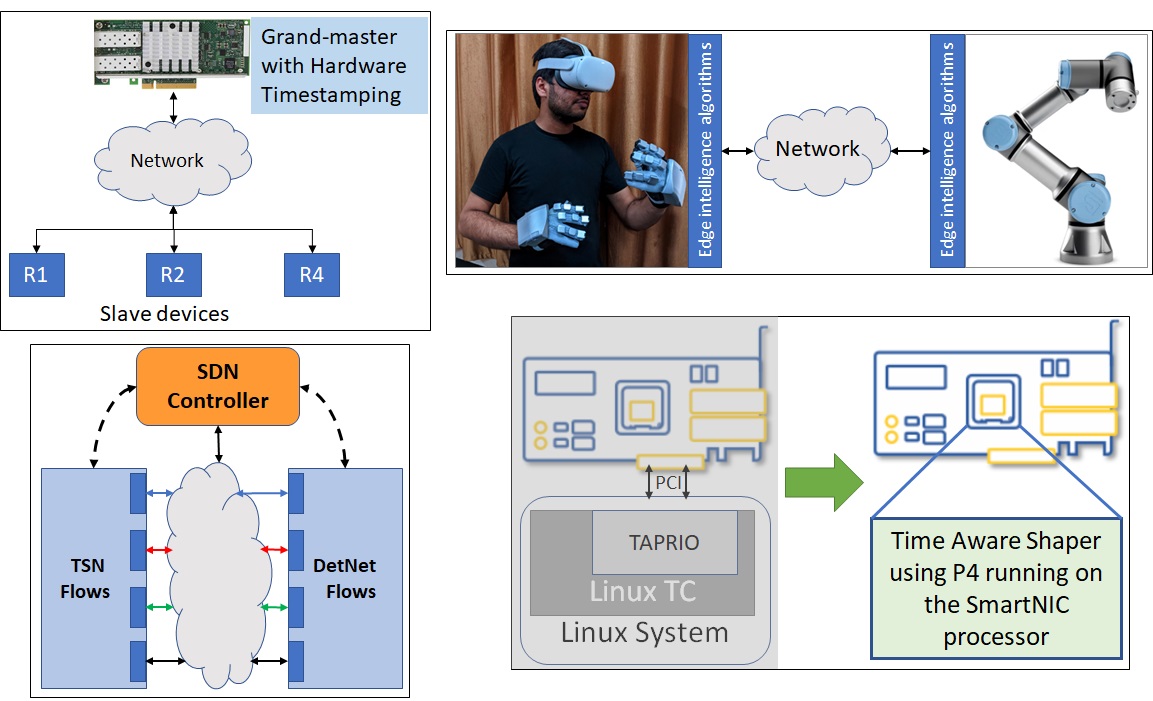
- Intelligence algorithms for performance improvement
- Edge intelligent switch ports on programmable switches using P4
Work Done:
Feedback to the human operator:
Control of UR3 robotic arm:
UR3 from Universal Robots is a high precision capable collaborative robot. It comes with a patented programming interface – PolyScope. But it has no real time control capability. A Python program using rospy library was developed for real time control of the robot using its external control feature. Some issues of vibration and jerky motion was fixed by developing few algorithms.
A demonstration of teleoperation of the UR3 robotic arm by a human operator using the Geomagic Touch haptic device:
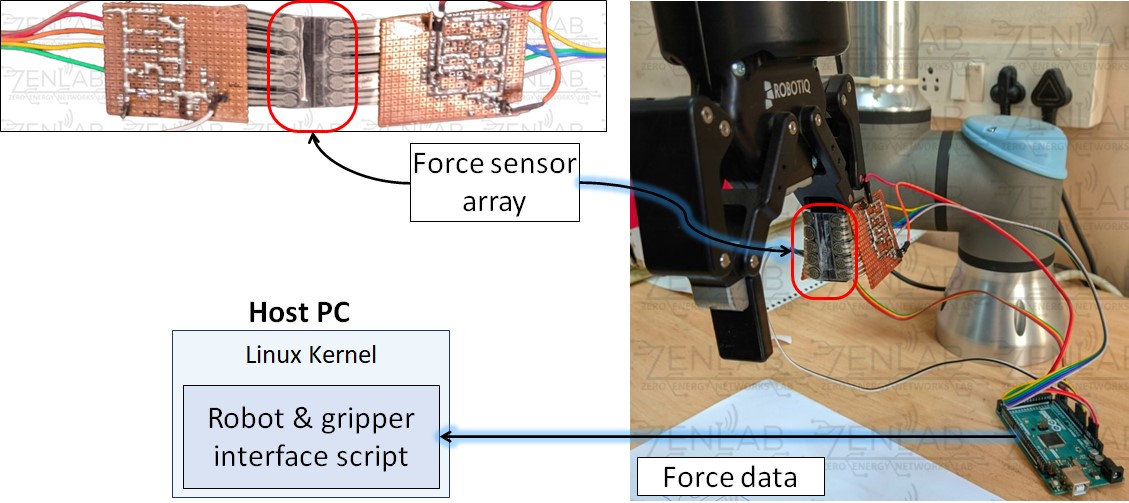
Intelligent gripping of a tool:
Interfaced Robotiq 2F-85 two finger gripper to be controlled in real time. This allows us to remotely move position the robot to hold a tool and then pick it up by closing the gripper using a button input form the haptic device. The accuracy of gripping entirely depends on the human operator. To assist the operator, we provide haptic feedback from the gripping surfaces. This functionality is enabled using a force sensor array developed by us. The force data can be sent back to the haptic device as feedback. We use this data to intelligently grip a tool by using edge intelligence algorithms.
Ongoing and future work:
People




Soumya Kanta Rana

Himanshu Verma

Kaushal Mhapsekar
Social media
