
INTRODUCTION
This Project implements the Position detection algorithm and digital level sensor using the 3 – axis accelerometer LIS3LV02DL. The project uses the STM32F103ZE high-performance ARM® CortexTM-M3 32-bit RISC core operating at a 72 MHz frequency. Potential applications for this kind of algorithm are personal navigation, car navigation, back-up GPS, anti-theft devices,map tracking, 3-D gaming, PC mouse, plus many others.The algorithm described in this document is useful in situations where displacement precision is not extremely critical. Other considerations and implications specific to the application should be considered when adapting this example.With minor modifications and adaptations in the final application this algorithm can achieve higher precision.
THEORY AND ALGORITHM
As we know the velocity is the derivative of the position and the acceleration is the derivative of the velocity, thus:
a = dv/dt and v = ds/dt
so a = d(ds)/dt2
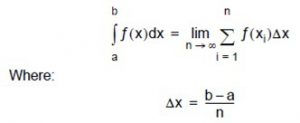
v = ∫a dt and
s = ∫(∫a dt)dt.
Integration is the area under the curve. It can be approximated to the sum of the very small areas whose width is tending to zero.
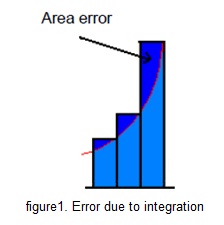
but this approach results in the area error, which keep on accumulating for the time the process is active. This area error is reduced by the first order approximation so called Trapezodial Method.
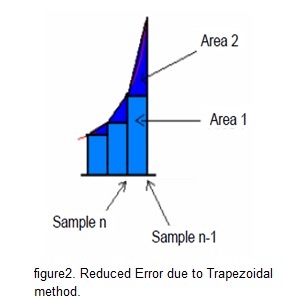
The first area is the value of the previous sample (a square). The second area is a triangle, formed between the previous sample (sample n-1) and the actual sample (sample n) divided by two.
![]()
SOFTWARE DESIGN CONSIDERATION
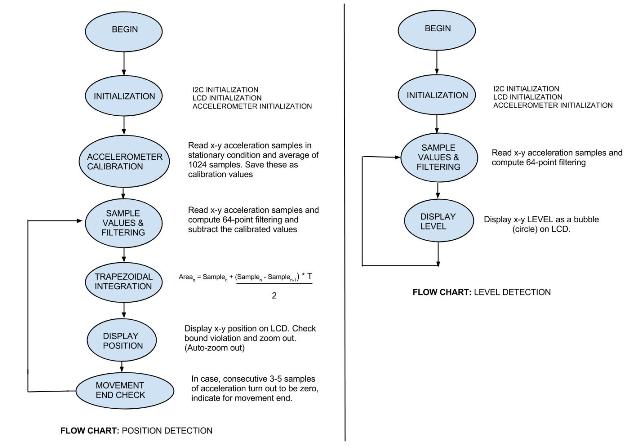
For real time implementation of the algorithm, the following steps are used:
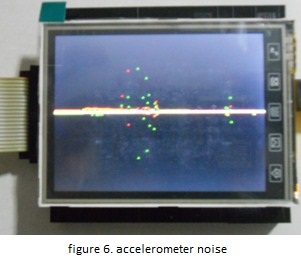
1. Data sensed by accelerometer is noisy. So averaging filter is used
2. Even with the previous filtering some data can be erroneous due to the mechanical noise, so another filter is implemented. Depending on the number of samples used for filtering, a window of real acceleration is selected.
3. Calibration is done to remove the acceleration offset.
4. Actual acceleration value is the sample minus the calibrated value.
5. Time between the acceleration samples must be same otherwise error is generated.
BLOCK DIAGRAM


FLOW CHART
ACCELEROMETER CONFIGURATION
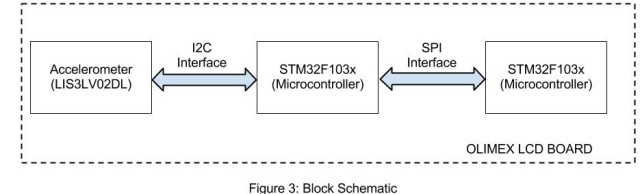
The Accelerometer LIS3LV02DL is connected to I2C bus as slave. STM32F103x is master on I2C bus. The GPIO pins PB10 and PB11 (I2C2) are configured in open drain alternate function mode. Also, for required application of position computations, the Control registers of accelerometer module is configured as follows. The detailed description of registers can be found in the datasheet of LIS3LV02DL.
SLAVE ADDRESS = 0x3A
CTRL_REG1 (20h)
![]()
we have configured it as 0xC7, which implies all three axis are enabled, decimation factor of 512 corresponding to 40Hz data rate.
CTRL_REG2 (21h)
![]()
we have configured it as 0x44, which implies no output registers updates while reading, enables the data ready generation and acceleration range as +/- 2g. Also, output data registers are represented in 12 bit right justified mode (2’s complement)i.e for +/- 2g, maximum count would be +/-2048.
CTRL_REG3 (22h)
![]()
we have configured it as 0x10, which implies internal filter is used and filter coefficient(Hpc) = 512.
RESULTS
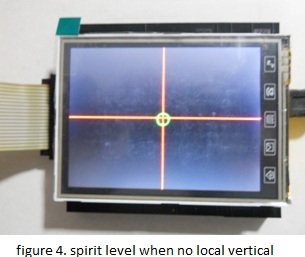
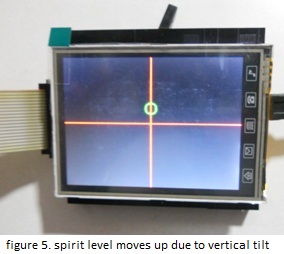
Digital Level Sensor Results:
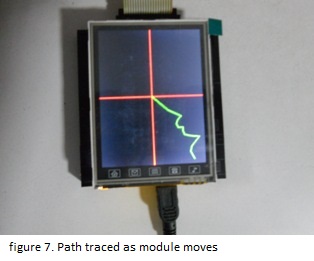
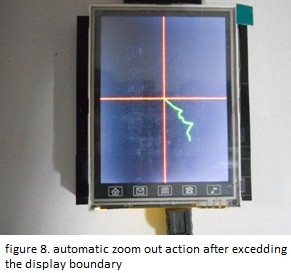
Position Detection Results:
CONCLUSION
The Digital Level Sensor and Position detection algorithm using 3-axis accelerometer has been successfully demonstrated. The position algorithm can be directly used with slight sensitivity modification for PC mouse application. However, the algorithm can be further improvised for navigation with the use of magnetometer for north reference. The position error due module tilt with respect to local vertical can be compensated with use of 3-axis gyroscope (orientation sensor).
REFERENCE
1. Application Note- AN3397
2. Data Sheet STM32F- Datasheet_stm32f103
3. Olimax LCD- STM32-LCD_data
PROJECT TEAM
Neeraj Purohit
Ravikumar K
Mahima Satsangi
Recent Comments