
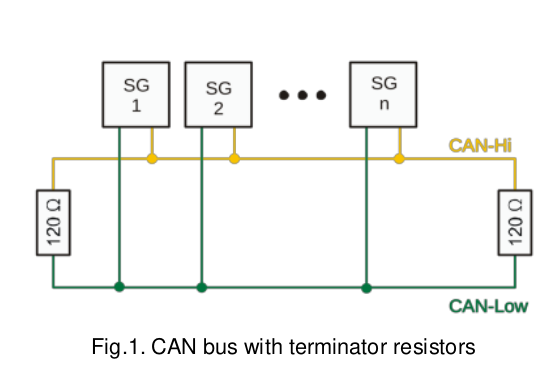
CAN Bus:
❖ A Controller Area Network (CAN Bus) is a robust vehicle bus standard designed to allow
microcontrollers and devices to communicate with each other’s applications without a host computer.
❖ For each device, the data in a frame is transmitted sequentially but in such a way that if more than one
device transmits at the same time, the highest priority device can continue while the others back off.
❖ Frames are received by all devices, including by the transmitting device.
Objective:
Sending simulated vehicle data through Bluetooth (CAN Master 1).
Implement a Bluetooth interfaced CAN data logger/ bus monitor.
Shows real time traffic on CAN bus on a Bluetooth receiver (through mobile App).
Store the bus data on the Bluetooth receiver for detailed analysis.
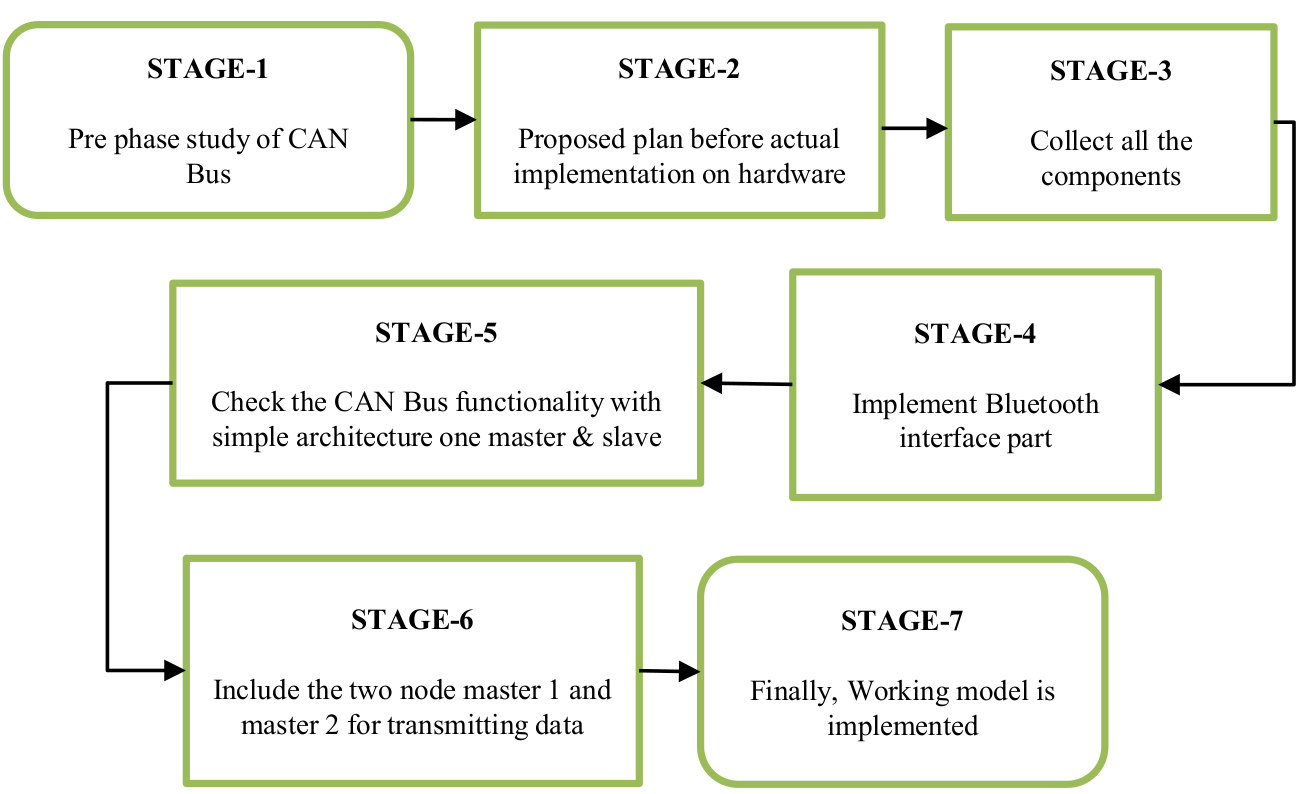
Implementation Plan:
The CAN bus traffic is simulated using two TIVA board and two CAN transceivers (MCP2551).
Where Master 1 will send the vehicle simulated data through Bluetooth and Master 2 will flow
some message continuously.
The CAN data logger / bus monitor shall be implemented using an additional TIVA board and a
CAN transceivers (MCP2551).
▪ This node shall not participate in the CAN bus transmission but will log all the traffic in the bus
▪ The captured bus transactions shall be transmitted using Bluetooth in near real time through
Bluetooth to a Bluetooth receiver (a mobile in this case)
▪ The Bluetooth receiver shall also store the bus transaction for offline analysis
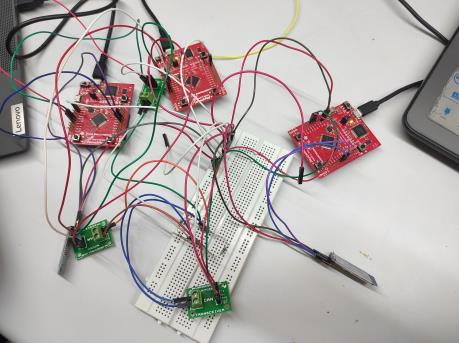
Components:
❖ Three Tiva Launchpads
❖ Three MCP2551 Transceivers
❖ Two 120 ohms resistor
❖ Two Bluetooth Module (HC-05)
❖ One Breadboard, Jumper wires
❖ Two Android Devices
Results:
Sending Vehicle Simulated data
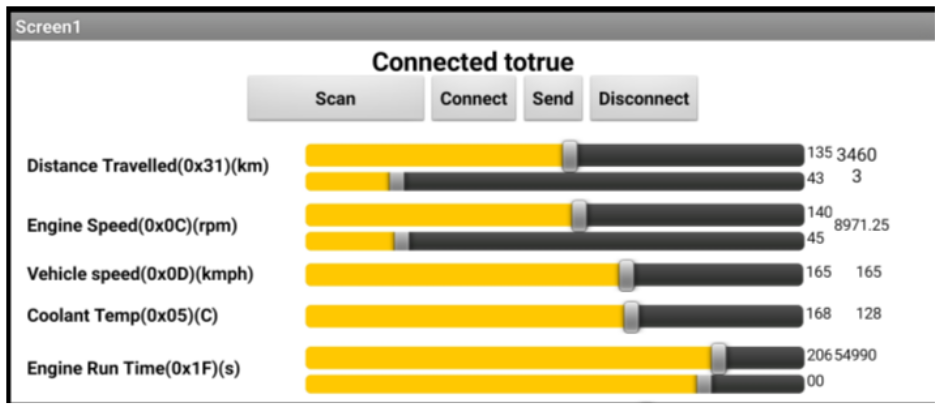
Bus Monitor Output
Log Data Files
Conclusion:
❖ A detailed implementation of CAN Bus to Bluetooth data logger is done.
❖ Through debug, we solved the problem of driving capability.
❖ Hardware implementation give the better hand on learning experience.
❖ Through this project, we realized how actually CAN Bus has important application in automotive and other industries.
❖ Got the idea of embedded system design procedure through this mini project like specification to implementation, algorithm to architecture, partitioning,
design blocks, Tiva implementation.
References
[1]en.wikipedia.org/wiki/CAN_bus
[2]Digital Interconnects from edwiki
[3]HC-05 Bluetooth Interfacing with TM4C123G Tiva C Launchpad – Keil uvision
Demo: Video Link
code: ESD_CAN_Bus_Proj_2022
Recent Comments