
I NTRODUCTION
Badminton is a fast-paced sport that requires players to move quickly and efficiently across the court. One of the key factors that
can determine a player’s success in the game is their ability to move swiftly from the center of the court to the corners. This
movement requires agility, speed, and precision, and can often make the difference between winning and losing a point.
To help badminton players improve their performance, many coaches and trainers have turned to embedded technology
solutions. By integrating sensors and other electronic components into a player’s racket or clothing or on court, it is possible to
track their movements and analyze their performance in real-time.
This information can be used to identify areas where a player needs to improve, such as their footwork, reaction time, or
overall speed. It can also help coaches develop personalized training programs that are tailored to the specific needs of each
player.In this project, we will be designing and building an embedded system that can track a badminton player’s movement on
the court. We will be using a combination of sensors, Tiva boards communicating using CAN BUS to implement the function,
and wireless communication technology to gather data and transmit it to a mobile device.
II MOTIVATION
Agility training is a training program in which the player makes the appropriate movements according to their coachs instructions
or due to the guidance of auxiliary apparatus. In badminton, players must accelerate, decelerate and change their direction of
movement to return the incoming shuttlecock. Agility training can enhance athletes action responses, such as start-up speed,
backcourt cross-step return speed and returning to the frontcourt speed, and also enable athletes to make correct decisions, such
as improving concentration to anticipate the balls landing point correctly. Therefore, agility training is important to improve
in competitive badminton[1]. The agility training apparatus has the characteristics of random placement and random light-up.
The randomness of this training system can effectively regulate the flexibility of the trainers cortical neural process. The trainers
decision-making ability in specific sports situations is enhanced to ensure that the trainer develops the best offensive and defensive
skills, and reduces unnecessary movements, thus improving the agility quality of badminton players.
III SYSTEM D ESIGN OVERVIEW
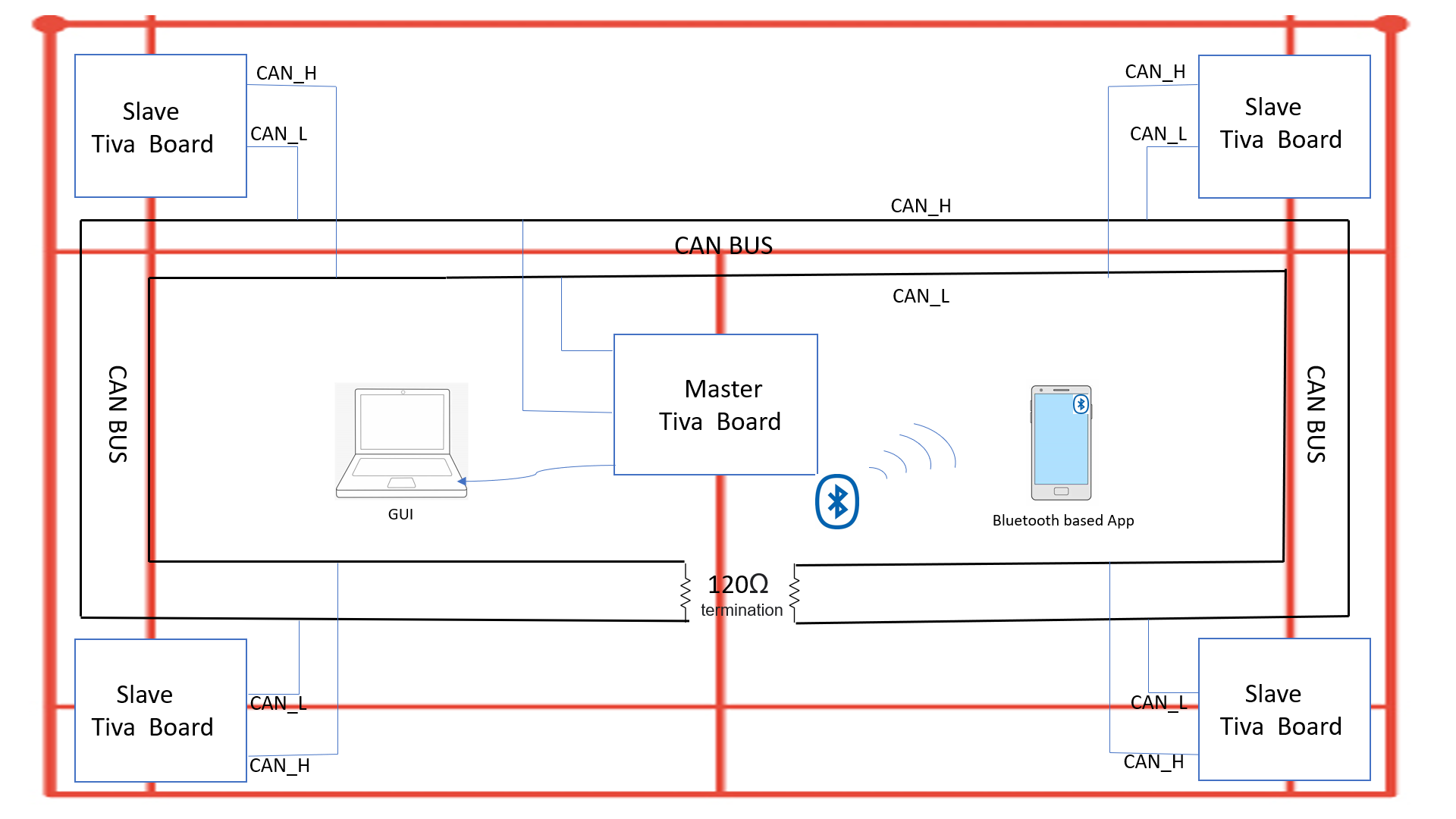
Figure 1: system overview
3.1
CAN BUS PROTOCOL:
Controller Area Network (CAN) is a communication protocol used in the automotive industry to allow microcontrollers and
devices to communicate with each other without a host computer. It is a multi-master, message-based system that enables
real-time data exchange between various electronic components. CAN supports multiple data rates and is capable of providing
reliable communication over long distances, making it ideal for use in a wide range of industrial and automotive applications. It
uses a two-wire bus with a twisted pair of wires and can support multiple nodes, allowing for distributed processing and control.
Overall, CAN is a powerful and widely-used protocol that is essential for many embedded systems projects.
The use of CAN BUS protocol in our project is of utmost importance as it enables communication between the Tiva boards
that are placed at different corners of the court. CAN BUS is a widely-used communication protocol that is specifically designed
for use in distributed embedded systems. It is known for its reliability, robustness, and low latency, making it an ideal choice for
real-time applications such as the one in our project.
CAN BUS allowing real-time data exchange between electronic components with data rate of about 500Kbps in our project
we can go for upto 1 Mbps using can bus, This facilitates the seamless exchange of data between the different corners of the
court, making it possible to track player movements in real-time.
Overall, the use of CAN BUS in your project enables you to create a sophisticated, distributed system that is capable of
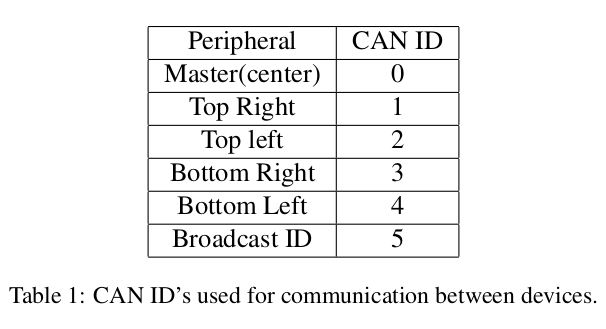
accurately tracking player movement and generating real-time performance data.The following table shows The CAN ID’s used
for each device.
3.2
Design Concept
The system comprises four Tiva boards positioned at each corner of the court, and a master board located at the center that
coordinates all other Tiva boards. These boards communicate with each other using the Controller Area Network (CAN) bus
protocol, which is widely used in the automotive industry to enable microcontrollers and devices to exchange data without
requiring a host computer. CAN bus is a multi-master, message-based system that facilitates real-time data exchange between
different electronic components.
The master board randomly selects one of the corner microcontrollers to indicate which corner the player should move to.
When the player reaches that corner, they press a switch and return to the center. The time taken for the player to reach the corner
after the indicator turns on (one-way time) and the time taken for the player to return back to the center (two-way time) are both
recorded and sent to the laptop GUI via UART and to a mobile app via Bluetooth. These timings are continuously plotted to
provide a visual representation of the player’s performance.The timing values are also written into a csv file , from where it can
be read for generating the player performance report after each session .
The implemented design operates in different modes and levels, allowing players of varying skill levels to participate. Depending
on the player’s experience, the level can be set to beginner, amateur, or pro. The switching speed of the corners varies based on
the selected level.
In addition to level selection, the system can also be configured to train the player to move in different directions, such as
throughout all four corners or diagonally, and in different directions, such as front, back, left, or right. These training modes can
help improve the player’s agility and coordination..
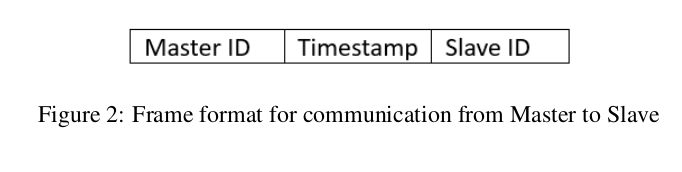
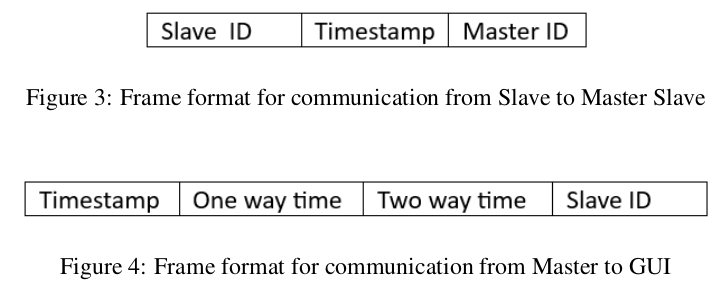
The various frame formats used for communication between Master and slave and between Master and GUI and between
slave and master are shown below
The GUI communicates with the master tiva board using UART communication . Once the User logs in and selects his
required level and mode of operation , the UI sends this data to master. This triggers the master and it sends synchronisation
message to all the slaves indicating the start of a session .After this the GUI captures all the data send by the master through
UART, it captures this data processes it and displays the two-way time , one-way time and each sector time in real time .
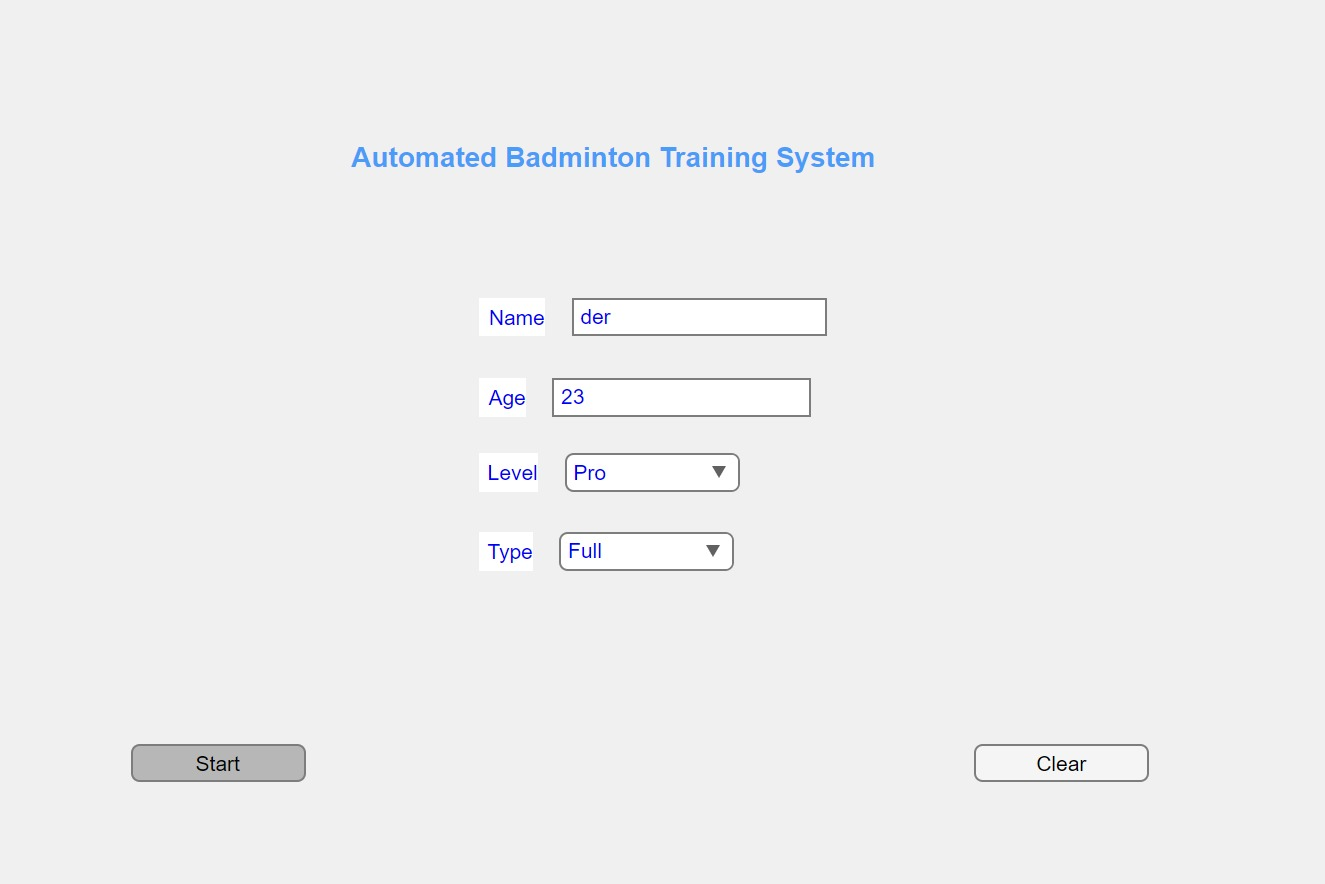
Figure 5: GUI First Page
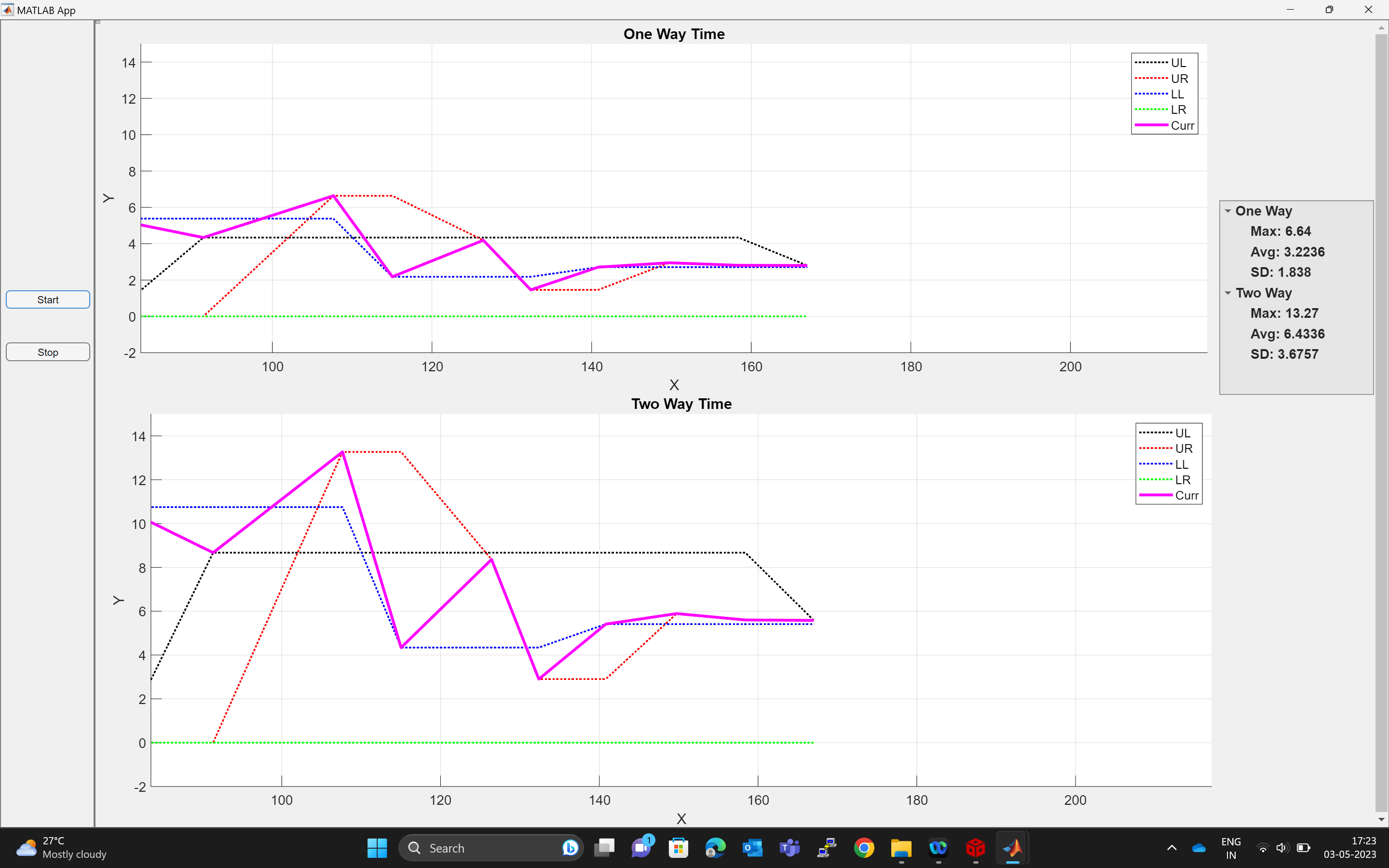
Figure 6: Realtime plotting of data in GUI
The Bluetooth app is an integral part of the system, as it allows users to control the system with ease and convenience. The
app provides users with various options to adjust the system’s settings and modes, including the ability to set the level of difficulty
based on the user’s experience.
The app also allows users to train themselves in different modes, such as moving throughout all four corners or diagonally,
and in different directions, such as front, back, left, or right. This feature helps users to improve their agility and coordination
while having fun with the game.
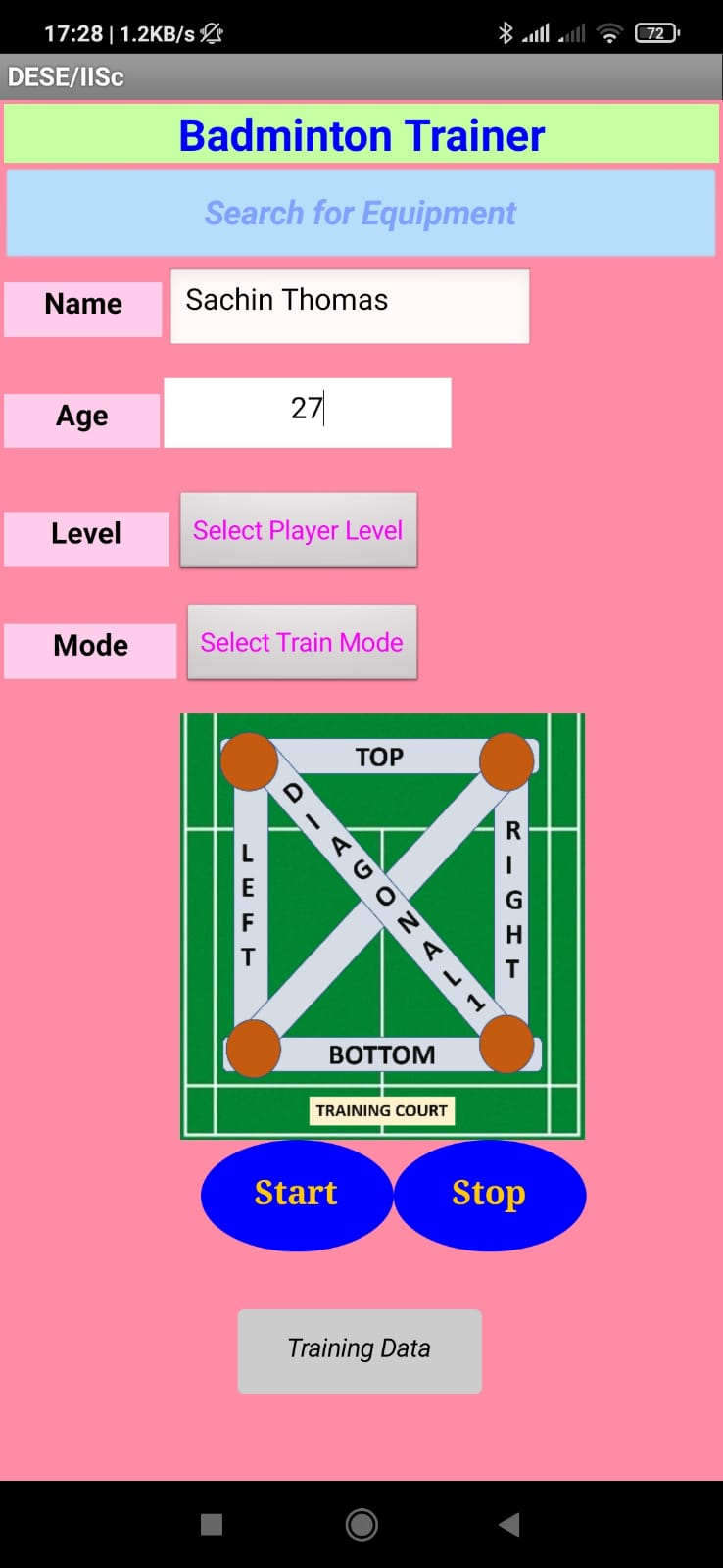
Figure 7: Mobile application interface
IV
COMPONENTS USED
1. 5 Tiva boards:
The Tiva C Series LaunchPad Evaluation Kit is a low-cost development platform based on the TM4C123GH6PM micro-
controller from Texas Instruments. It features a wide range of peripherals, including USB, Ethernet, and CAN interfaces, as
well as on-board sensors and a graphical user interface. The Tiva board is designed for rapid prototyping and development
of embedded systems, and is supported by a comprehensive software ecosystem that includes a range of development tools,
software libraries, and example code. It is a popular choice for students, hobbyists, and professional developers looking to
build advanced embedded systems for a variety of applications.
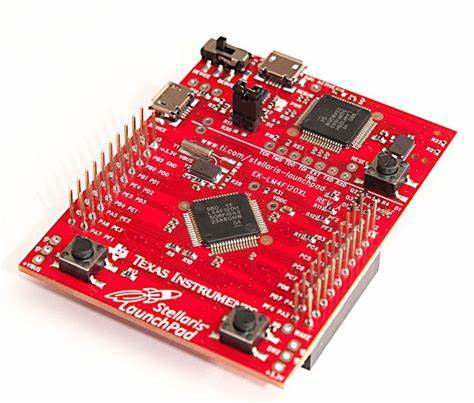
Figure 8: Tiva C series TM4C123G Lanchpad
2. CAN Transceivers
A CAN (Controller Area Network) transceiver is a type of electronic component that interfaces between a CAN controller
and the physical CAN bus in a system. It serves as a communication link, allowing the controller to send and receive data
over the bus.
The transceiver typically converts the digital signals from the CAN controller into a physical signal that can be transmit-
ted over the bus, and vice versa. It also provides voltage level shifting and signal conditioning to ensure reliable data
transmission over long distances and in noisy environments.
3. Jumper wires,burst ticks
4. Bluetooth module
5. Breadboard
6. Buzzers
7. PC for running GUI and Android mobile for running App
V PROJECT TESTING AND DEMO
In the test phase of the badminton performance tracking system project, we evaluated the performance and functionality of the
system by conducting a series of tests in a controlled environment.
First, we tested the communication between the Tiva boards using the CAN BUS protocol. We connected the boards to a network
and verified that they were able to exchange data and communicate with the central master board.then established synchronization
among all for accurate time stamping. Next we have implemented main functionality, And tested complete system on a small
table as a proof of concept.We repeated this test several times to ensure the accuracy and consistency of the measurements to see
the performance of the system.
We also tested the Bluetooth and UART connectivity of the system by connecting it to a laptop and mobile device, respectively.
We verified that the data was being transmitted correctly and that the GUI was displaying the data in real-time. Overall, the test
phase was successful, and we were able to demonstrate the functionality and performance of the badminton performance tracking
system. We believe that this system has the potential to help players improve their skills and achieve better results in competitive
play.
VI CONCLUSION
In conclusion, the badminton performance tracking system project has demonstrated the potential for using embedded systems
and modern communication protocols to improve sports training and performance tracking. By using a network of Tiva boards
and a central master board, we were able to create a real-time system for tracking player movement on the court and measuring
the time taken to reach each corner and return to the center.
The system uses the CAN BUS protocol to enable real-time data exchange between the Tiva boards, and Bluetooth and
UART to transmit the data to a laptop GUI and mobile device, respectively. This allows players and coaches to analyze their
performance data in real-time and make adjustments to their training and strategy.
Through the test phase, we were able to verify the accuracy and consistency of the system’s measurements, as well as its
usability and functionality. Overall, we believe that this system has the potential to revolutionize sports training and performance
tracking, and we hope that it will inspire further development and innovation in this area.
REFERENCES
[1] Tan, B., Wang, E., Cao, K., Xiao, L. and Luo, L., 2023. Study and Design of Distributed Badminton Agility Training and Test System.
Applied Sciences, 13(2), p.1113.
Demo:A Scalable Badminton Training System
Code: codepart
Recent Comments