
Objective
To develop a robot which can navigate to a specified location without any external assistance while avoiding the obstacles on its way.
Components
1. MSP432P401R high-precision ADC LaunchPad
2. TI Robotic System Learning Kit
3. Romi Encoder Pair Kit, 12 CPR, 3.5-18V
5. Sharp IR distance measuring sensor
6. HC-05 Bluetooth module
Block Diagram
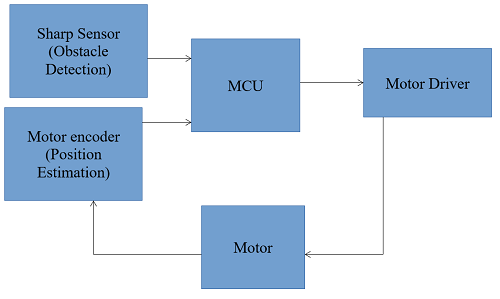
Working Principle
1) Sharp IR sensors – For obstacle avoidance.
2) Magnetic rotary Encoders – For counting the number of rotations of the wheel, using which the current coordinates of the bot were estimated. This input is given to a suitable dead reckoning algorithm to navigate the bot to a given set of coordinates.
3) HC-05 Bluetooth module for debugging the coordinate updation in the bot.
Experimental Set-Up and Results
Practical view of Robot
Future work
1) Closed loop Vref tracking to reduce errors due to falling battery.
2) PI controller to reduce errors in straight line movement due to speed mismatch of the two motors.
References
[1] MSP432P401R SimpleLink™ Microcontroller LaunchPad™ Development Kit User’s Guide
[2] TI Robotic System Learning Kit[2]
[3] Romi Encoder pair [3]
Recent Comments