
Presence detection using MEMS thermal sensors is an intelligent way of controlling and managing the loads in a building.Intelligent load management under constrained energy availability is a way of extending the backup and thereby reducing the installation size of of renewable energy sources like solar energy and wind energy systems in buildings. This is important in terms of reducing the cost of initial installation of such systems. Many times majority of the loads in the buildings can be categorized as critical loads and non critical loads. But some of the loads may fall in both categories depending on the comfort level and convenience of the user. Depending on the availability of a person in a room the loads can be turned on or off.
Introduction
In this project we have implemented Omron’s D6T-44L MEMS Thermal sensor using STM32L-Discovery board. These are high sensitivity sensors that enable detection of stationary human presence.These are high-precision area temperature detection with low cross-talk field of view characteristics along with superior noise performance and digital output. In this project the sensor was installed at a location and continuously provided the temperature readings. These readings were used and based on a threshold level we could assert whether a person was present or not.
Hardware Platform
Processor Requirements
- STM32L-Discovery Board
- Omron D6t-44L (MEMS Thermal Sensor)
 STM32L-Discovery Board
STM32L-Discovery Board
Main features of the board useful for the project are as follows.The datasheet can be accessed here[1]
- Microcontroller in an LQFP64 package
- 256 KB Flash memory
- 32 KB RAM
- 8 KB EEPROM
- Provides external power supply 3v and 5V(useful for sensor supply).
- A usb debugger
- GPIO ports
- I2C,SPI protocol support
Omron D6t-44L
This is a high sensitivity sensor that detects the surface temperature of a radiating body. This is different from traditional pyroelectric sensors which detect only change of signal (i.e. moving bodies, not the stationary one).The D6T series sensors are made up of a cap with silicon lens, MEMS thermopile sensor chips, and dedicated analog circuit and a logic circuit for converting to a digital temperature value on a single board through one connector.

Omron D6T-44L MEMS Thermal Sensor
Operating Principle
This sensor works on the Seebeck Effect[2].The silicon lens collects radiated heat (far-infrared ray) emitted from an object onto the thermopile sensor in the module.The radiated heat (far-infrared ray) produces an electromotive force on the thermopile [3]sensor.The analog circuit calculates the temperature of an object by using the electromotive force value and a measured temperature value inside the module.The measured value is outputted through an I2C bus which can be used for further processing using STM32L-Discovery Board.
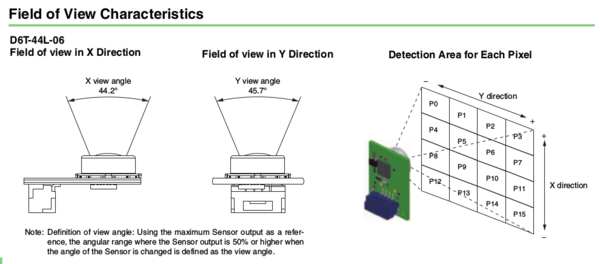
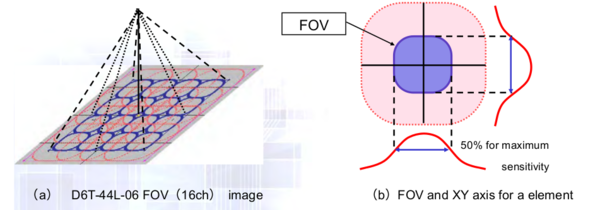
D6T-44L-06 has sensor chip arrays of 16 channels (4×4).Each channel corresponds to a pixel (as shown in the figure below) and measures temperature independently. In the Field of view of the sensor that includes all the pixels, whenever an object appears the temperature of corresponding pixel changes.By mounting the signal processing circuit closely to the sensor chip,a low noise temperature measurement is realized.The application note can be seen here.[4]
Application in Human Detection
Please note that the sensitivity area is wider than the FOV specified area. When an object to be measured is smaller than the sensitivity area, the background temperature effects the measurements. Though Omron’s D6T sensor corrects a temperature measurement value by using a reference heat source (blackbody furnace), the measurement’s value is influenced by the emissivity of the specific material of the object to be measured, and the surface shape of the occupant relative to the sensitivity area.
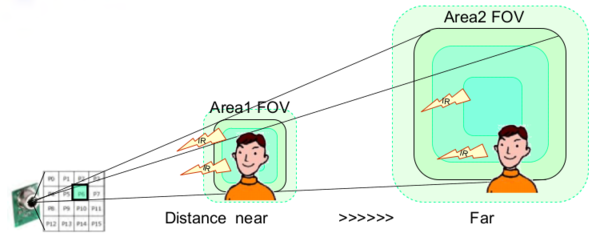
Changing Factor of Measurement by distance
Note that the occupied area in FOV becomes smaller with increasing distance and the background temperature prevails. So for detecting human beings, the application will be limited to close range when the detection programming scheme only judges by temperature value. To extend the detection distance, improvements to the judgment accuracy can be made via software programming, considering time change, heat source location and human being movement.
Future Add ons and challenges
This project can be combined with the “Intelligent Load Balancing under constrained energy availability” so as to add on to home automation. This sensor can be used with the spark core wifi enabled board to include the above mentioned two projects in one board. As we are controlling this over the internet, cyber security should also be provided.
References
- https://www.youtube.com/watch?v=-_7EeKNRziw
- http://www.st.com/web/catalog/tools/FM116/SC959/SS1532/PF250990
- https://www.spark.io/
- Team
- Anjani Kumar Bansal (10298)
- Prashuk Jain (10302)
Recent Comments