
I INTRODUCTION
Self-balancing robots contribute a factor of excellence to important aspects of robotics. These robots are often two-wheeled and
work on the inverted pendulum concept. A line follower robot is an automated guided vehicle that follows a visual line, either a
black line on white surface or vice versa. The colors of the line and the background surface should be sufficiently in contrast to
each other for this to work since the robot differentiates between them using InfraRed sensors. The data from the sensors then
goes to the microcontroller which controls the rotation speed of the wheels according to the control algorithm. A line follower
robot implements the path navigation property.
There are many tasks that demand a bounty of manpower, time, and attention. In industries, the load carried around by men
reduces their time and potential to do other useful tasks. In hospitals, especially after passing through covid-19, a lot of waste
such as masks, PPE kits are all disposed of further by people who are rather vulnerable to the infection that they still contain.
Even the job of serving in restaurants, which require multitasking abilities can sometimes get extremely hard as it is next to
impossible to attend everyone at the same time. In educational institutes office workers can get help with such robots to pass
documents from one place to another without waiting for a person to get free and deliver them. These and dozens of other
tasks applicable indoor call for the same sort of the prerequisites that could be fulfilled without consuming this much time or
manpower. All these reasons, and more inclined us towards finding one of the possible solutions: Line follower self-balancing
bot.
The two-wheeled robots have an edge over three and four-wheeled robots in terms of maneuverability. Since the turn ratio is
reduced to zero, we can achieve smoother rotations while changing the course of the path with accurate navigation in compact
spaces.
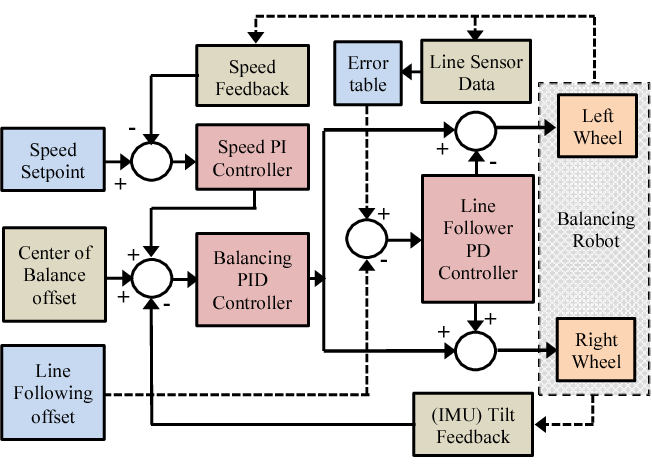
Figure 1: Block Diagram
II OBJECTIVE
The robot must be capable of following a line.
• The robot should track a line, making varying degrees of turns.
• It needs to continue tracking the line despite interruptions or breaks.
• Calibration of the line’s darkness threshold should be possible.
• Reliability is crucial.
• The line’s color shouldn’t matter if it’s darker than the surroundings.
III LITERATURE R EVIEW
In [1] , TABAR, a line follower bot, was designed and implemented for a robotics competition. The objective was to identify
the line drawn on the floor and transverse along with it. The path can either be a black stripe on a white surface giving a high
contrast or magnetic field, which is invisible and provided in advance. Here infrared sensors were mounted on the robot to sense
the path, where it transmits the data to the processor and then processor makes the required decisions and provides commands to
the drivers based on the goal to be reached.
In [2], the objective was to develop a wheeled robot with a line following capability. An ARM cortex-3 based microcontroller
called LM3S811 was used as controller to receive the data from the line follower sensors for accurate and smooth operations. The
differential drive type of locomotion system was replaced by using PID with a dynamic controller algorithm for the improvements
in navigation. It was observed that the technique can be implemented under the real-time system requirements.
In [3], an algorithm to follow a black line using a camera module mounted on the robot was developed. Here raspberry-pi was
used as core processor. A significant performance improvement was observed using this technique to follow the line, where the
direction of movement of the robot gets modified based on the detected path and this technique was found to be more reliable.
In [4], a Motor driver using H bridge technique was designed. The motor speed and direction of rotation was controlled using
the H bridge circuit, where the PWM input to the MOSFET plays a significant role in achieving the proper implementation. By
dictating the PWM duty cycle they have directly controlled the speed of motor in reference to change the motor terminal voltage.
dsPIC30f4011 microcontroller was used to control the overall circuitry, where it generates the PWM signal necessary for the
control of the terminal voltage at the motor. The controller was tested for different levels of speed and has noticed fair results.
IV MOTIVATION
The Line Follower Self-Balancing Bot project is a blend of robotics, electronics, and coding. It’s not just about following a line;
it’s about building a machine with both pinpoint precision and elegant balance. Imagine a bot that glides effortlessly along a
path, defying gravity with its self-balancing capabilities.
This project promises an exhilarating challenge. We’ll delve into the intricate world of sensors, crafting a system that reads
the environment and guides the bot’s movements. We’ll write code that analyses this data, seamlessly controlling the motors to
maintain perfect balance. With every step, we’ll refine our knowledge. From integrating the sensors seamlessly to meticulously
tweaking the control algorithms, each hurdle overcome becomes a testament to our ingenuity. This project isn’t just about
building a bot; it’s about building ourselves. We’ll cultivate resilience, problem-solving prowess, and a deeper understanding of
robotics principles.
V IMPLEMENTATION
Project has been divided into three phases:
1. Checking all sensors and circuitry is working fine and working towards the designing.
2. Designing of self-balancing bot.
3. Last phase involves integration of both self-balancing and line follower.
Components to be used:
• Tiva C series Launchpad with TM4C123GH6PM microcontroller (cortex M4- architecture)
• Cytron LSA08 Infrared Sensor Array
• Two geared DC motors (12V and 300 rpm)
• L298N H bridge motor driver
• LiPo battery (11.1V, 2200 mAh)
• Two Wheels (8 cm diameter) + One small dummy wheel to provide balance
5.1 Component Details:
Tiva C TM4C123GH6PM microcontroller launchpad provides us with the following peripherals: ADC (Analog to Digital Con-
verter) â Needed to process analog input from LSA08 (IR Sensor Array used) PWM (Pulse Width Modulation) â Needed to
provide individual voltage supplies to the wheels for speed and direction control General Purpose Timer â Needed to provide
accurate periodic interrupts to process data at a deterministic rate It consists of Cortex M3/M4 processor having the following
features:
• Harvard architecture with unified but fixed memory layout
• 32-bit embedded processor
• Greater performance efficiency
• More work with less latency
• Low power & Low cost
• Enhanced determinism
• Nested Vectored Interrupt Controller to service interrupt in known number of cycles
• Improved code density
• Only supports Thumb 2 instruction set
• Ease of use
Cytron LSA08 Infrared Sensor Array module has eight infrared sensors, and can be calibrated to detect light line on a dark
background OR a dark line on a light background.
Depending on the position of the line with respect to the sensors, the module generates an output voltage between 0 to 4 V, with
the junction detection voltage being 4 V. If the line is detected at the exact centre of the sensor array, the generated voltage is 1.9
V, which we use as a reference for our control system transfer function.
L298N Motor Driver is a dual H-Bridge motor driver which allows speed and direction control of two DC motors at the same
time. The module can drive DC motors that have voltages between 5 and 35V, with a peak current up to 2A.
REFERENCES
[1] Mehran Pakdaman, M. Mehdi Sanaatiyan, Mahdi Rezaei Ghahroudi A Line Follower Robot from design to Implementation: Technical
issues and problems, IEEE International Conference, 2010.
[2] Mustafa Engin, Dilshad Engin Path planning of line follower robot, Conference: Education and Research Conference (EDERC), 2012
5th European DSP, 2012
[3] John Patrick P. Banjao, Louis Van Hecke, Wansu Lim, Myung-Sik Kim Line Tracing Technique for Smooth Driving, International Journal
of Innovative Technology and Exploring Engineering (IJITEE), 2019
[4] Tolga Ãzer, Sinan Kivrak, YÃŒksel OÄuz International Journal of Innovative Research in Science, Engineering, and Technology, 2017
code:self balancing
Recent Comments