
Motivation:
In recent years, robotics has emerged as a vital field with diverse applications, ranging
from industrial automation to the development of autonomous vehicles. Among these
applications, maze-solving bots play a pivotal role, not only in puzzle-solving but also in
navigating hazardous environments through sophisticated path planning techniques.
Furthermore, they find practical use in everyday applications like Google Maps, aiding in
determining the shortest route between two locations. Our objective is to develop a toy
car integrated with sensors, enabling it to navigate through mazes by assessing its
surroundings and responding appropriately to reach the final destination.
Introduction:
The maze-solving bot comprises of sensors, actuators, and a microcontroller. Its intended
functionality is to autonomously explore and navigate through maze structures. Sensors
are essential to identify obstacles present in the path and feedback mechanisms help in
controlling the movement of the car. This facilitates the determination of viable paths and
enables the bot to reach predefined destinations.
Methodology and Algorithm planned:
Our project involves integrating two L298N H-Bridge motor drivers, 4 dc motors, three
HC-SR04 ultra-sonic sensors together and get them working in parallel.
4 dc motors are used to control four wheels of the car and three HC-SR04 ultra-sonic
sensors are placed on three sides of the car (excluding the back side) to sense any
obstacle within unacceptable range and actuate (/change) the direction of motor
accordingly.
Below is the algorithm we plan to start with to solve the maze. This algorithm is inspired
by depth-first-search algorithm where we prioritize following a single path until
encountering a dead end, then backtracking to explore alternative routes.
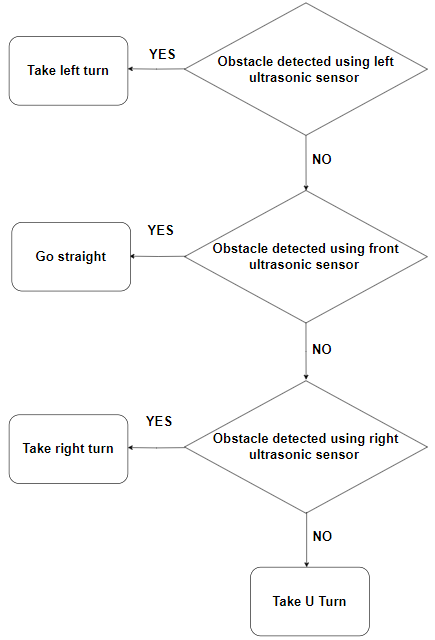
Fig: Maze solving bot using Depth-first-search Algorithm
Above algorithm looks promising to start with !!
Future Work:
This work can further be extended by remembering (/ storing) all the paths traversed so
that whenever same maze is used for the second time, it would be solved quickly.
Further, breadth-first-search approach can be explored to study the trade-offs between
breadth-first-search and depth-first-search approaches.
References:
[1] TIVA Based Obstacle Avoiding Robot : 7 Steps – Instructables
[2] A. S. Hidayatullah, A. N. Jati and C. Setianingsih, “Realization of depth first search
algorithm on line maze solver robot,” 2017 International Conference on Control,
Electronics, Renewable Energy and Communications (ICCREC), Yogyakarta, Indonesia,
2017, pp. 247-251, doi: 10.1109/ICCEREC.2017.8226690.
code:Maze_solving_bot1
video: Maze solving bot
Recent Comments